Bienvenue !
Nous sommes ravis de vous accueillir sur le forum des pilotes privés.
Vous êtes sur un forum de discussions public, permettant aux pilotes privés, mais aussi à tous les passionnés des choses de l'air, d"échanger leurs idées, leurs expériences, leurs questions.
S'il s'agit de votre premier accès à ce site et que vous n'avez pas créé de pseudonyme, votre accès est restreint. Vous devez obligatoirement vous enregistrer avant de pouvoir accéder à la totalité des rubriques, et apporter vos contributions. L'enregistrement ne prend que quelques secondes.
Pour cela, cliquez sur l'option "M'enregistrer " dans le menu à droite ci-dessus.
Si vous possédez déjà un identifiant, indiquez-le dans la zone de saisie ci-dessous.
Nous vous remercions pour votre compréhension, et vous souhaitons de passer de bons moments sur le Forum des Pilotes Privés.
Les Administrateurs
Comment choisir un niveau de vol
Re: Comment choisir un niveau de vol
![]() de patrice lapierre le Vendredi 5 Juin 2009 12:14
de patrice lapierre le Vendredi 5 Juin 2009 12:14
Philippe Warter a écrit:Et donc, pour moi, c'est la WINTEM qui détermine l'altitude/niveau/hauteur.
+1
Patrice Lapierre
-

patrice lapierre - Messages: 1416
- Inscription: Samedi 15 Septembre 2007 12:45
- Localisation: Toujours là où il ne faut pas !
- Aérodrome: LFMV, LFNV, LFNH
Re: Comment choisir un niveau de vol
![]() de mikelima le Vendredi 5 Juin 2009 14:02
de mikelima le Vendredi 5 Juin 2009 14:02
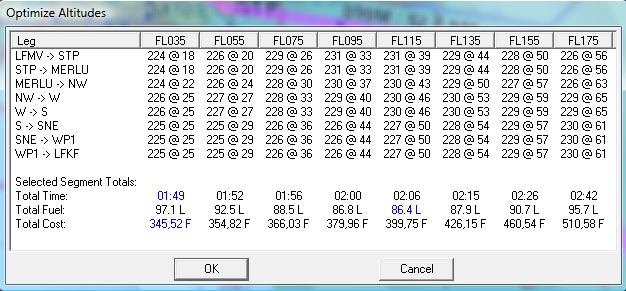
A partir de l' EIFL on parlait de théorie, de calcul, de simulation, de ....etc ...etc...
Même si ta Wintem te donne comme meilleur niveau le FL85, tu n'y monteras pas pour faire MTL - FJR
Donc en faisant abstraction du vent, du relief et tant d'autres choses, sur un trajet de 100 Nm avec tel ou tel avion que fait-on?
La règle des 1/3 n'est pas du tout adaptée dans cet exemple
En reprenant EIFL sur 100 Nm sans vent et le fameux PA28, on trouve une montée au FL45
montée 7' = 10Nm
croisière 32' = 65 Nm
descente 12' = 25 Nm
Le seul cas ou il y a trop d'essence c'est quand il y a le feu
-

mikelima - Messages: 847
- Inscription: Mardi 18 Septembre 2007 19:33
- Aérodrome: ACDCV Carpentras (LFNH) & Peyrelevade
- Activité/licences: PPL VFR/NVFR/exIFR/Voltige SEP/MEP/ULM
Re: Comment choisir un niveau de vol
![]() de patrice lapierre le Vendredi 5 Juin 2009 18:25
de patrice lapierre le Vendredi 5 Juin 2009 18:25
Patrice Lapierre
-
patrice lapierre - Messages: 1416
- Inscription: Samedi 15 Septembre 2007 12:45
- Localisation: Toujours là où il ne faut pas !
- Aérodrome: LFMV, LFNV, LFNH
Re: Comment choisir un niveau de vol
![]() de flyjodel le Vendredi 5 Juin 2009 22:11
de flyjodel le Vendredi 5 Juin 2009 22:11
-

flyjodel - Messages: 2542
- Inscription: Vendredi 14 Septembre 2007 20:06
Re: Comment choisir un niveau de vol
![]() de arogues le Vendredi 5 Juin 2009 22:20
de arogues le Vendredi 5 Juin 2009 22:20
Un jour j'ai fait un Biarritz - Nogaro au FL75. Au 75 y'avais 30kts arrière. J'avoue, j'etais seul, en DR48, avec 3h30 de pétrole et il faisait frais. 180 km/h indiqué je montais à 1000ft/min.
160 kts sol à 2600trs/min. Le temps de la montée etait de 7 min env. La descente, etant seul, j'ai pris 1500ft / min. Donc env. 5 min, plus 2 min de rab.
Au FL20, y'avais 5 kts arrière. J'ai tout gagné ce jour la ! (meme si je ne payais pas le vol...).
Après faut pas être embeté par les nuages...
-

arogues - Messages: 3179
- Inscription: Mercredi 18 Juin 2008 11:06
- Localisation: Toulouse / Villeneuve sur Lot
- Aérodrome: Villeneuve sur Lot - LFCW
- Activité/licences: PPL|FI/FE-IR-Voltige
Re: Comment choisir un niveau de vol
![]() de richard DMS le Mardi 14 Juillet 2009 01:41
de richard DMS le Mardi 14 Juillet 2009 01:41
Profil optimal de vol
L’objectif est de déterminer quel est le meilleur profil de vol théorique pour une croisière en niveau : faut-il monter vite pour bénéficier rapidement de l’amélioration de la vitesse propre due à l’altitude ou lentement pour ne pas trop dégrader la vitesse ? L’approche est analytique.
Equation de Lagrange
Considérons un voyage sur une distance S. Supposons le vent nul et les aérodromes de départ et d’arrivée situés au niveau de la mer. Appelons s la distance parcourue depuis le début du vol : s varie de 0 à S. Appelons V(s) la vitesse (TAS) de vol, Vz(s) le vario et h(s) l’altitude de vol en s (on a h(0) = h(S) = 0). Notons ĥ = dh/ds la pente du vol et remarquons que ĥ = Vz/V.
Comme L = 1/V, (1) s’écrit : d/ds(∂(1/V)/∂ĥ) = ∂(1/V)/∂h, soit : d/ds(– 1/V² ∂V/∂ĥ) = – 1/V² ∂V/∂h. En développant et en multipliant par V3, on a :
(2) 2(dV/ds).(∂V/∂ĥ) + V.(∂V/∂h – d/ds(∂V/∂ĥ)) = 0
Résolution analytique d’un cas simplifié « du premier ordre »
Choisissons une expression très simple de V, fonction de la vitesse TAS de croisière rapide en palier MSL notée Vc et du premier ordre en h et ĥ :
(3) V(h,ĥ) = Vc (1 + bh – cĥ).
Limites de validité
Cette expression n’est pas complètement réaliste. D’abord, la vitesse TAS croit continûment avec l’altitude sans tenir compte de la perte corrélative de puissance du moteur (notion d’altitude de rétablissement).
Ensuite, déterminons Vz en fonction de V. De (3) on tire V = Vc (1+bh–cVz/V), d’où Vz = V/c (1+bh–V/Vc). Vz s’annule en V = 0 et V = Vc (1+bh). Vz est maximal quand V = (1+bh)Vc/2 (sommet de la parabole en V) et vaut alors Vzmax = (1+bh)Vc /4c. Notons que l’on peut estimer c à partir de Vz0, vario maximum à MSL :
(4) c = Vc / (4Vz0).
Vz a bien un maximum correspondant à la vitesse de meilleure montée qui vaut Vc/2 pour h = 0, plutôt que ~ 60% de Vc comme l’indiqueraient la plupart des manuel de vol. Mais Vzmax augmente avec h, ce qui est contraire à la réalité : c’est ici la deuxième limite importante de ce modèle simplifié.
Calcul des éléments du vol
En dérivant V(h,ĥ) selon (3) : dV/ds = Vc (bh’– ch’’), ∂V/∂h = bVc, ∂V/∂ĥ = –cVc et d/ds(∂V/∂ĥ) = 0. (2) s’écrit alors : 2Vc (bh’–ch’’).(–cVc) + Vc (1+bh–ch’)(bVc – 0) = 0 d’où, en divisant par (cVc)² :
(5) 2h’’– 3(b/c)h’+ (b2/c2)h + b/c2 = 0.
Déterminons d’abord le profil du vol. L’équation différentielle (5) est linéaire du second ordre. Posons k = b/c. Le discriminant de 2X2–3kX+k2 est 32k2–4.2 k2 = k2 et les racines sont k = b/c et k/2 = b/2c. Si b est nul (5) s’écrit h’’ = 0 et les solutions sont alors h(s) = ms + n. Si b est non nul, h(s) = –1/b est solution et les solutions de (5) sont alors h(s) = m.eks + n.eks/2 – 1/b. On suppose dans la suite b non nul.
Posons Y(s) = eks/2 et p = e–kS/2. On voit que h = h(Y) = mY2 + nY – 1/b est un polynôme de degré 2 en Y. Les conditions h(0) = h(S) = 0 imposent pour h(Y) les racines Y(0) = 1 et Y(S) = 1/p. h est donc de la forme h(s) = q(Y – 1)(Yp –1) et, par identification, q vaut –1/b. Ainsi :
(6) h(s) = (1/b)(Y– 1)(1– pY) = (1/b).(–pY2 + (1+p)Y – 1) et le profil du vol est donné par :
Déterminons l’altitude maximale. Elle est atteinte pour Y = ½(1+1/p), le milieu de la parabole h(Y). Alors h = (1/b)(½(1+1/p)–1)(1–½p(1+1/p)) = (1/4b)(p – 1)2/p = (1/4b)(p1/2 – p–1/2)2.
(8) hmax = (1/4b)(ekS/4 – e–kS/4)2. Les puristes écriront (8.1) hmax = 1/b sh2(bS/4c), sh étant le sinus hyperbolique.
Déterminons ensuite la vitesse sol. Calculons d’abord h’ = dh/ds = (dh/dY).Y’ = (1/2c)(–2pY+p+1)Y car Y’ = dY/ds = (k/2)Y et k = b/c.
Déterminons le vario. Vz = Vh’ = ½Vc (1+p)Y(1/2c)(–2pY+1+p)Y = Vz0(1+p)(1+p–2pY)Y2 car, selon (4), Vc/4c = Vz0. Comme Y(0) = 1, le vario initial vaut Vz(0) = Vz0(1–p2), d’où :
(10) Vz(0) = (Vc/4c)(1 – e–kS) = Vz0.(1 – e–kS).
Comme Y(S) = 1/p, le vario à l’arrivée vaut Vz0(1+p)(1+p–2)/p2 = Vz0(1–1/p2), donc :
(11) Vz(S) = – (Vc/4c)(ekS – 1) = – Vz0.(ekS – 1).
Profitons-en pour calculer aussi la pente à l’arrivée. h’(S) = (1/2c)(–2pY(S)+p+1)Y(S) = (1/2c)(1–1/p) car Y(S) = 1/p. Comme c = Vc/(4Vz0), on a :
(11.1) pente d’arrivée = – 2(ekS/2 – 1).Vz0/Vc.
Il nous reste à calculer la durée du vol T = ∫(0,S)ds/V(s). Or V = ½Vc(1+p)Y et 1/Y(s) = Y(–s).
(12) T = (4c/bVc) (1 – e–kS/2) / (1 + e–kS/2). Les puristes écriront : (12.1) T = (4c/bVc) th(bS/4c) = 1/bVz0 th(bVz0 S/Vc), th étant la tangente hyperbolique.
Estimation simplifiée du gain de temps
kS/4 n’est pas vraiment petit : 1/k représente la distance caractéristique du problème et si S = 2/k, kS/4 vaut alors 0,5. Faisons tout de même un développement limité à partir de (12.1) en se reposant sur la « bonne » convergence de th : thx = x – x3/3 + o(x4), d’où T ~ 4/kVc ((kS/4) – (kS/4)3/3) ~ S/Vc (1 – (kS/4)2/3), soit :
(12.2) T ~ S/Vc (1 – b2S2/48c2).
En se reposant sur la « bonne » convergence de sh2x = x2 + o(x3), à partir de (8.1) on obtient aussi :
(8.2) hmax ~ bS2/16c2 et (12.3) T ~ S/Vc (1 – bhmax/3).
Le gain de temps relatif et l’altitude maximale croissent avec le carré de la longueur du parcours. Le gain de temps est de l’ordre du tiers du gain de temps correspondant au parcours de S à hmax…ou de l’ordre du gain de temps correspondant au parcours de S au tiers de hmax.
Illustration et discussion
Pour illustrer, prenons Vc = 50 m/s (~97kt) MSL et Vz0 = 4 m/s (~ 790ft/mn) MSL. Il est connu des pilotes privés que b est de l’ordre de 1% par 700ft ou par 200m, soit b ~ 5.10-5 (en m-1). Par (4), estimons c = Vc/4Vz0 = 50/4.4, soit c = 3,1 (sans unité si Vz et V tous deux en m/s). 1/k, distance caractéristique, vaut alors 62 km. Traçons le profil d’un vol de 100 km. On calcule alors Vz(0) = 3.2m/s ~ 640ft/mn et V(0) = 36 m/s (~70 kt), ce qui est vraisemblable.
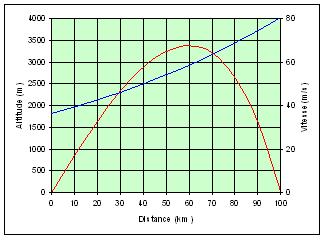
S/Vc vaut 2000 s, soit 33,3 mn et T vaut 1900 s (soit 31,7 mn). La vitesse TAS moyenne sur le parcours est ainsi de 52.6 m/s (~ 102 kt) pour une vitesse CAS MSL de 50 m/s : le gain de temps est de 5%. Pour ce faire, il a fallu monter jusqu’à hmax = 3374m…soit plus de 11.000ft. Ceci suppose le maintien de la puissance maximale continue jusqu’à 3374 m (~ 11.000ft), alors que l’altitude de rétablissement de nos moteurs est de l’ordre de 5000 - 7000ft pour 75% de la puissance. Enfin, le profil de descente est très « agressif » : dans le cas illustré, on arrive à destination à V(S) = 81 m/s soit ~ 157 kt, probablement au-dessus de la Vno, avec un risque fort d’empaffer la Vne et…de se faire mal aux oreilles. La pente d’arrivée est d’ailleurs de –20% : Banzaï !
Ainsi, ce vol n’est pas vraiment réalisable. Néanmoins, le résultat reste qualitativement intéressant :
- Même pour ce modèle optimiste – V et Vz croissent avec h, sans limite – les gains issus d’une vitesse propre plus élevée en altitude restent limités : le vent en fonction de l’altitude reste le premier facteur déterminant.
- On choisira un vario initial d’autant plus soutenu que la distance du parcours est grande. Il diminuera ensuite progressivement jusqu’au FL visé.
- En pratique on débute la montée pleins gaz, donc à 100% de la puissance au FL0, puissance qui décroitra ensuite avec l’altitude (l’altitude de rétablissement est nulle pour nos moteurs non turbocompressés) ; il suffira donc de trimer initialement à une vitesse CAS de montée qui donne, par exemple, 2/3 du vario max puis d’accélérer progressivement.
- Si la descente optimale est vraisemblablement plus courte que la montée - en temps comme en distance, une descente plus prudente - à la Vno – sera d’une durée analogue à celle de la montée
Richard
-

richard DMS - Messages: 106
- Inscription: Samedi 15 Septembre 2007 21:48
- Aérodrome: LFFE, LFEY
Re: Comment choisir un niveau de vol
![]() de Andy le Mardi 14 Juillet 2009 10:40
de Andy le Mardi 14 Juillet 2009 10:40
-

Andy - Messages: 3862
- Inscription: Samedi 10 Novembre 2007 14:24
- Aérodrome: Vinon sur Verdon - LFNF
- Activité/licences: VFR / à jour
Re: Comment choisir un niveau de vol
![]() de denis r-e le Mardi 14 Juillet 2009 11:25
de denis r-e le Mardi 14 Juillet 2009 11:25
Andy a écrit:Ouf ! Alors là tant qu'à avoir mal à la tête avec tous ces calculs, je préfère laisser l'avion au hangar et aller au bar boire une bière !
Ca le fait une aspirine dans une Orval ???

- denis r-e
- Messages: 4757
- Inscription: Vendredi 14 Septembre 2007 22:13
- Aérodrome: LFGS
Re: Comment choisir un niveau de vol
![]() de Bob le Mardi 14 Juillet 2009 11:28
de Bob le Mardi 14 Juillet 2009 11:28
denis r-e a écrit:Ca le fait une aspirine dans une Orval ???
Oui, à condition de prendre un comprimé effervescent !
-

Bob - Messages: 12496
- Inscription: Vendredi 14 Septembre 2007 20:05
Re: Comment choisir un niveau de vol
![]() de Leon Robin le Mardi 14 Juillet 2009 12:02
de Leon Robin le Mardi 14 Juillet 2009 12:02
Cas 1 : 1 heure de vol maxi :
bon, ça se présente comment ? Fait un peu chaud, on va monter à 300 ft sol sans entrer dans la classe D de Machin qui commence au FL65. faudra faire gaffe au relief à 4500 ft vers Trou sur Venaudon. si ça tabasse un peu on verra pour monter.
Cas 2 : 1 à 2 h de vol :
On va prendre le FL 75 ou 85 pour rester en dehors des Rxx et Ryy, en passant par le vor TMP (Tartempion 116.85) et éviter la CTR de Beuzeville Michel Martin International. La Wintemp prévoit du vent de face mais on verra à l'usage si c'est vrai où s'ils se sont trompés comme souvent.
Cas 3 : 2 à 4 heures de vol
mêmes paramètres que le cas 2, ne serait-ce que parce que ça prend 1/2 h pour monter du FL85 au FL115 avec la plupart de nos avions. On le fera quand même si les têtes de Cu montent plus que prévu, à moins qu'on ne repasse en dessous de 3000 ft sol si ça menace de se fermer vers l'arrivée, à moins encore qu'on ne doive descendre au FL45 ou 55 si ça se b)ache par dessus. De toutes façons, on avisera en fonction des TCu qui vont probablement commencer à dépasser de la couche vers la mi-parcours. Pas de bol, la Wintemp nous donne un vent arrière vachement favorable, mais en plein au niveau de la couche.
Cas 4 : plus de 4 h de vol
Théorique, car l'autonomie de l'avion le permet tout juste, et il est plus que probable que la vessie d'un passager ou d'une passagère impose une escale technique. D'ailleurs, on a traversé la France, et personne n'a le sésame qui donne le droit de causer angliche dans le poste pour passer les frontières.
" Ceux qui sont prêts à sacrifier leur liberté à leur sécurité ne méritent ni l'une, ni l'autre " (d'après Benjamin Franklin)
Site de mon aéroclub : http://aeroclub-uaca.org
-

Leon Robin - Défense des plateformes
- Messages: 15182
- Inscription: Mercredi 12 Septembre 2007 22:59
- Aérodrome: Cannes-Mandelieu (LFMD)
- Activité/licences: PPL (ex-TT transformé)
Re: Comment choisir un niveau de vol
![]() de Daniel Michiels le Mercredi 15 Juillet 2009 01:02
de Daniel Michiels le Mercredi 15 Juillet 2009 01:02
Et souvent le choix n'est pas tres haut.
Bizarre aussi,cette idée de rentabilité.C'est un loisir,pas un travail.Donc la rentabilité passe au millième plan.
-

Daniel Michiels - Messages: 2718
- Inscription: Lundi 17 Septembre 2007 22:52
- Aérodrome: LFDU (St Laurent)
- Activité/licences: PPl,VFR nuit
Re: Comment choisir un niveau de vol
![]() de Jan TUTAJ le Dimanche 26 Juillet 2009 10:51
de Jan TUTAJ le Dimanche 26 Juillet 2009 10:51
Pour le reste, je pouffe ...
- Jan TUTAJ
Re: Comment choisir un niveau de vol
![]() de pilote privé le Dimanche 26 Juillet 2009 13:05
de pilote privé le Dimanche 26 Juillet 2009 13:05

Et quand tu vois les moutons en bas, t'as pas envie de descendre.
-

pilote privé - Messages: 2467
- Inscription: Dimanche 30 Mars 2008 01:23
- Localisation: Entre Moule, Merlu et Poulp
Re: Comment choisir un niveau de vol
![]() de andre44 le Dimanche 26 Juillet 2009 16:35
de andre44 le Dimanche 26 Juillet 2009 16:35
Et quand tu vois les moutons en bas, t'as pas envie de descendre.
Quand tu vois de petites taches blanche d'en haut si cela bouge c'est des moutons , si cela ne bouge pas c'est les ouvriers de la voirie avec des casques blancs
André
De temps a autre arpenter la rivierre c'est plaisant en cas de pane la piste est toujours en dessous.
tu vas rendre visite a des amis qui habitent sur le bord de la rivierre , tu leur fait un tour d'avions . (vaut mieux etre en bonne entente avec les riverains ..

-

andre44 - Expert hélices
- Messages: 9370
- Inscription: Samedi 15 Septembre 2007 00:39
- Aérodrome: SY3 Sorel
Re: Comment choisir un niveau de vol
![]() de Julien le Dimanche 26 Juillet 2009 16:37
de Julien le Dimanche 26 Juillet 2009 16:37
andre44 a écrit:Quand tu vois de petites taches blanche d'en haut si cela bouge c'est des moutons , si cela ne bouge pas c'est les ouvriers de la voirie avec des casques blancs
Je vois qu'ils n'ont pas meilleure réputation chez toi que chez nous !
- Julien
- Messages: 5276
- Inscription: Vendredi 14 Septembre 2007 20:41
- Localisation: LFLY
- Aérodrome: LFLY
- Activité/licences: PPL(A)
Retourner vers Technique (avions, moteurs, avionique, prépa vols, smartphones...)
Qui est en ligne
Utilisateurs parcourant ce forum: Aucun utilisateur enregistré et 35 invités